










流模块
ZED SDK 现在可以通过本地网络流式传输 ZED 的视频信号。同样运行 SDK 的无限数量的远程计算机可以将此流用作输入,就像它们通过 USB 连接一样。
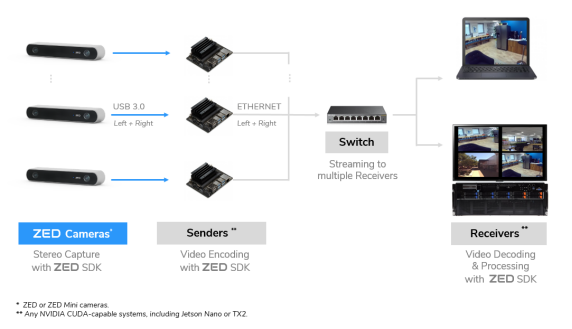
这是多摄像机设置的游戏规则改变者。用户现在可以根据需要将任意数量的 ZED 摄像机直接连接到网络,并方便地同时访问各种视频源。这极大地促进了团队之间的协作。用户现在可以使用低功耗,低成本的中间设备通过以太网发送视频源,而不是直接通过USB连接。因此,ZED摄像机可以部署在以太网布线可到达的各种地方,从而实现长距离和室外覆盖。
此外,用户现在可以将多个ZED摄像机的处理卸载到一个功能强大的服务器上。它不仅可以降低设备的总成本,还可以通过批量处理图像来提高计算密集型应用程序(如深度学习)的效率。
扫描到融合点云
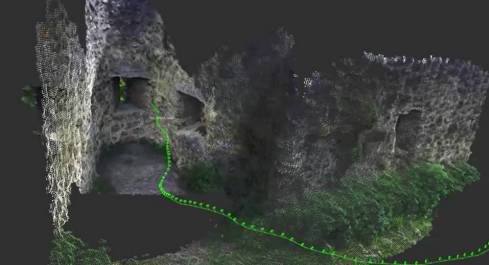
除了网格之外,我们的空间映射模块现在还可以扫描为融合的点云格式。
我们根据大众需求添加了此功能。它使ZED更易于使用为点云构建的流行库和算法,尤其是机器人中的点云。此功能在我们的C++ API、ROS 和 ZEDfu 应用程序中可用。
适用于 ROS2 的 ZED
我们刚刚发布了ROS2 Crystal Clemmys的ZED包装器的测试版。功能包括具有生命周期设计,YAML配置,Python启动脚本,动态重新配置,将RGB和深度发布到其自身主题的组件,彩色3D点云发布和位置跟踪。
乐轩

图片由Aion Robotics提供
ROS 插件包括添加到 v2.8 SDK 的所有功能,以及许多改进和错误修复。大的变化包括向TF树添加base_link,以便更直接地将ZED相机添加到标准ROS配置中,用于在平坦表面上导航的2D模式以及启动文件的返工。
统一

我们的 Unity 插件现在支持在一台 PC 上使用多个摄像机。这些摄像机可以通过传统方式通过 USB 连接,也可以通过 SDK 的新流模块通过网络进行流式传输。
这使得从多个角度以流行的VR流媒体风格轻松记录交互式AR体验。
我们已经重构了整个插件来实现这一目标。这包括示例脚本,现在可以利用多个相机。例如,Drone Shooter演示中的射弹可以影响从任何摄像机中看到的现实世界。
此外,我们删除了插件对Unity图层的依赖,以掩盖ZED装备中来自错误摄像头的"帧"四边形。现在,您可以将这些摄像机的剔除蒙版设置为所需的任何图层。
我们还添加了姿势平滑功能,以减少使用空间内存进行跟踪时的"跳跃",添加了对新 SteamVR Unity 插件 v2 的支持以及其他一些改进和修复。
其他主要变化
1、虚幻自定义引擎和插件已更新为支持2.8和引擎v4.21
2、针对 v2.8 更新的 Python 包装器,包括流功能
3、 改进的 Jetson 安装过程:现在每个 Jetpack 版本都有一个安装程序,可在所有支持的主板上运行,而不是每个主板和 Jetpack 都有一个安装程序。
4、解决了Jetson在重新启动后阻止ZED Mini被检测到的常见问题;在 Jetpack 4.2 中提供了修复程序,以后将应用于旧版本。
让(蓝色)光!

现在,您可以按需手动打开/关闭 ZED 的蓝色 LED。使用此选项可指示控制台不可用时的特定条件,例如录制 SVO。