










众所周知,香蕉剥皮通常对人类来说很轻松,但这个看似简单的任务对于大多数机器人却很棘手,处理柔软的水果对机器人来说是一个挑战,机器人通常缺乏灵巧和细致入微的触觉来处理精致的果肉而不破坏它们。水果的不均匀形状—即使是相同类型的水果也会有很大差异,也会使通常充当此类机器人大脑的计算机视觉算法感到困惑。
实际上,对机器人而言,香蕉剥皮是一个“系统工程”,需要多轴柔性机械臂,灵巧手,智能感知和人工智能的结合。尤其在没有灵巧手的情况下,想要让刚性夹爪实现柔性操作更是难上加难。

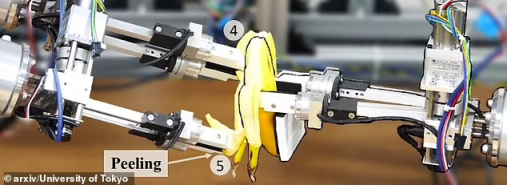
近期,东京大学的研究人员破解了香蕉剥皮的“武功秘笈”,打通了机器人的任督二脉,让UR机器人通过机器学习训练可以轻松优雅地进行香蕉剥皮,而不会将其粉碎成碎片。该机器人有两个6轴机械臂和两只手爪,每只手爪都有两个可以抓握物体的“手指”。为了训练这个“骨骼过于刚性”的机器人,一位耐心的研究人员在 13 多个小时内剥了数百根香蕉,产生了足够的数据来训练机器人自己做这件事。“考虑到目标香蕉剥皮任务的复杂性,我们认为 13 小时的演示是可行和值得的,”研究人员在发表于arXiv的研究中写道。
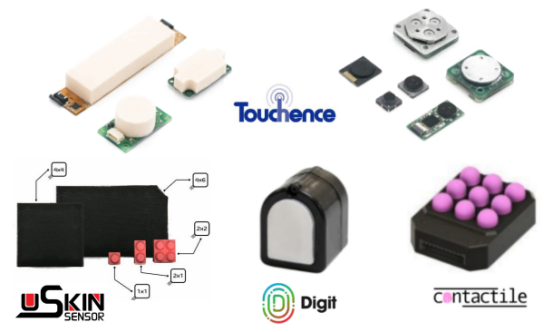
对于不太可能损坏香蕉的大范围运动,机器学习模型会绘制出一条轨迹,模仿人类无需太多思考的行为。但当手臂被要求精确地操纵香蕉时,系统就会通过触觉感知(如下是可以用于机器人指尖的各种触觉传感器),深度学习和智能决策切换到一种适应性状态,对操作过程中的各种意外变化做出适应性反应。
虽然这对我们来说似乎很简单,但研究人员通过将机器人分为九个阶段来简化机器人的任务。这包括抓住香蕉,把它从桌子上捡起来,抓住尖端并剥皮。
实验使用的机器人框架包括了双臂UR机器人系统,还有ZED双目立体3D相机(StereoLabs)被安装在具有二维平移结构的机器人系统上。

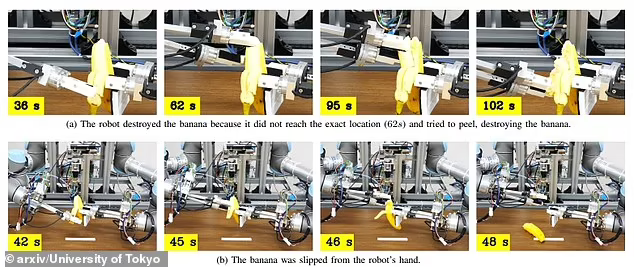
一旦研究人员训练了机器人,他们就会在一堆香蕉上对其进行测试。他们发现 57% 的时间,该机器人能够成功地剥香蕉皮而不把它弄成糊状。平均而言,整个过程每次不到三分钟。
除了有趣之外,研究人员还希望机器人背后的技术将来可以应用于其他需要精细运动技能的任务,最典型的应用如微创手术机器人的灵巧操作,空间机器人操作等。虽然机器人在操作乘区上开始学习人类,但要真正做到像人类一样的自如和自然,还有很长的路要走,尤其需要各种视觉和触觉传感器的辅助,让其操作自适应性更强。