



机器人开发面临的最大挑战之一是如何创造出类似于人手灵活性的夹爪或灵巧机械手。虽然该领域已经取得一些进步,比如允许通过两指夹爪抓住扁平盒子或包裹等常规规则物体,但有几种物体类型对机器人来依然很有挑战,比如光滑的物体,复杂形状的物体,多品类的物体或重量动态可变的物体,这些场景和目标需要机器人在抓握过程中根据环境和抓握感知有一定的自适应性。
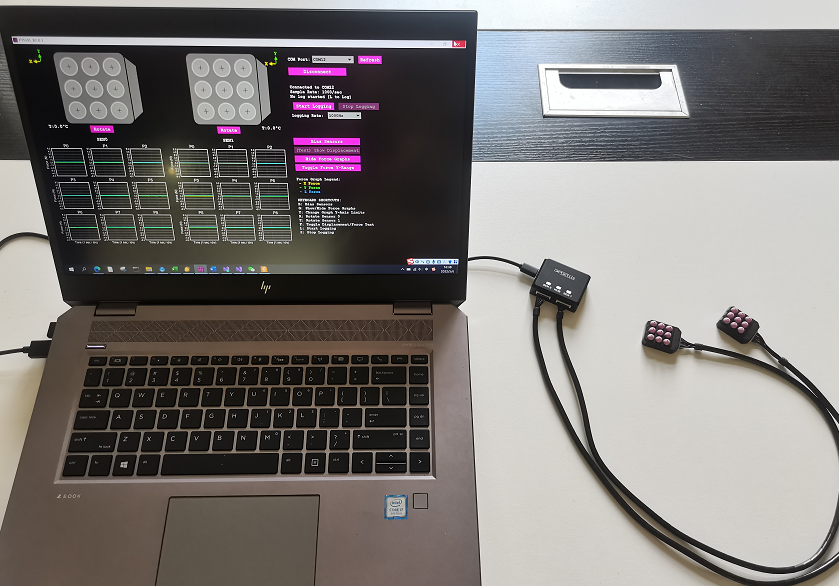
总部位于澳大利亚的初创公司Contactile希望通过开发新的触觉传感器技术来改变这种状况,该技术结合了摩擦和重量传感,使抓手能够更好地通过触觉感知识别和抓取物体,并为机器人抓取和操作任务匹配适当的力。
该公司2022年5月3日宣布筹集到250万美元的种子资金用于开发其传感器开发和量产。

该公司希望利用这项技术来帮助解决仓库和零售等市场机器人柔性分拣货物的短期问题,但也在研究农业、医疗保健甚至太空中的棘手问题,比如创造可以在月球或火星上建造基础设施的机器人,或者从事卫星维修任务。
该公司希望利用这项技术来帮助解决仓库和零售等市场机器人柔性分拣货物的短期问题,但也在研究农业、医疗保健甚至太空中的棘手问题,比如创造可以在月球或火星上建造基础设施的机器人,或者从事卫星维修任务。
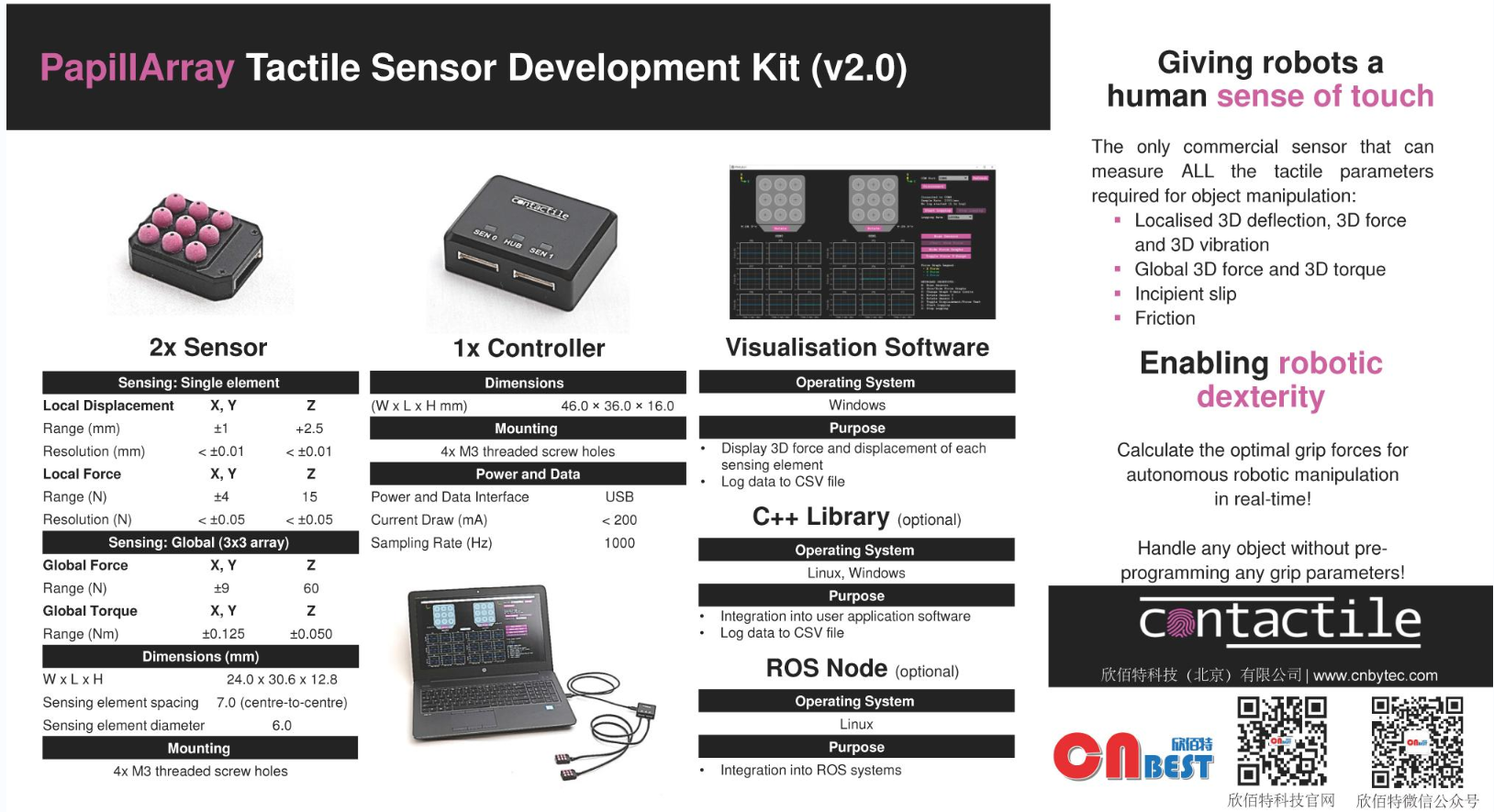
Contactile触觉传感器的特点:
触觉传感器可提供机器人柔性抓取和灵巧操作所需的如下触觉力参数:
1、 局部3维偏移、3维力和3维振动
2、全局三维力和三维力矩
3、滑动感知
4、摩擦力计算等