










海洋污染已成为全球性环境问题,其中海底垃圾的清理尤为困难。据研究,海洋中约有 2600 万至 6600 万吨垃圾,其中超过 90% 沉积在海底。传统上,潜水员收集海底垃圾既成本高昂又充满风险。为了解决这一问题,欧盟资助了 SeaClear2.0 项目,旨在开发一种能够自主检测和分类水下垃圾的机器人解决方案。

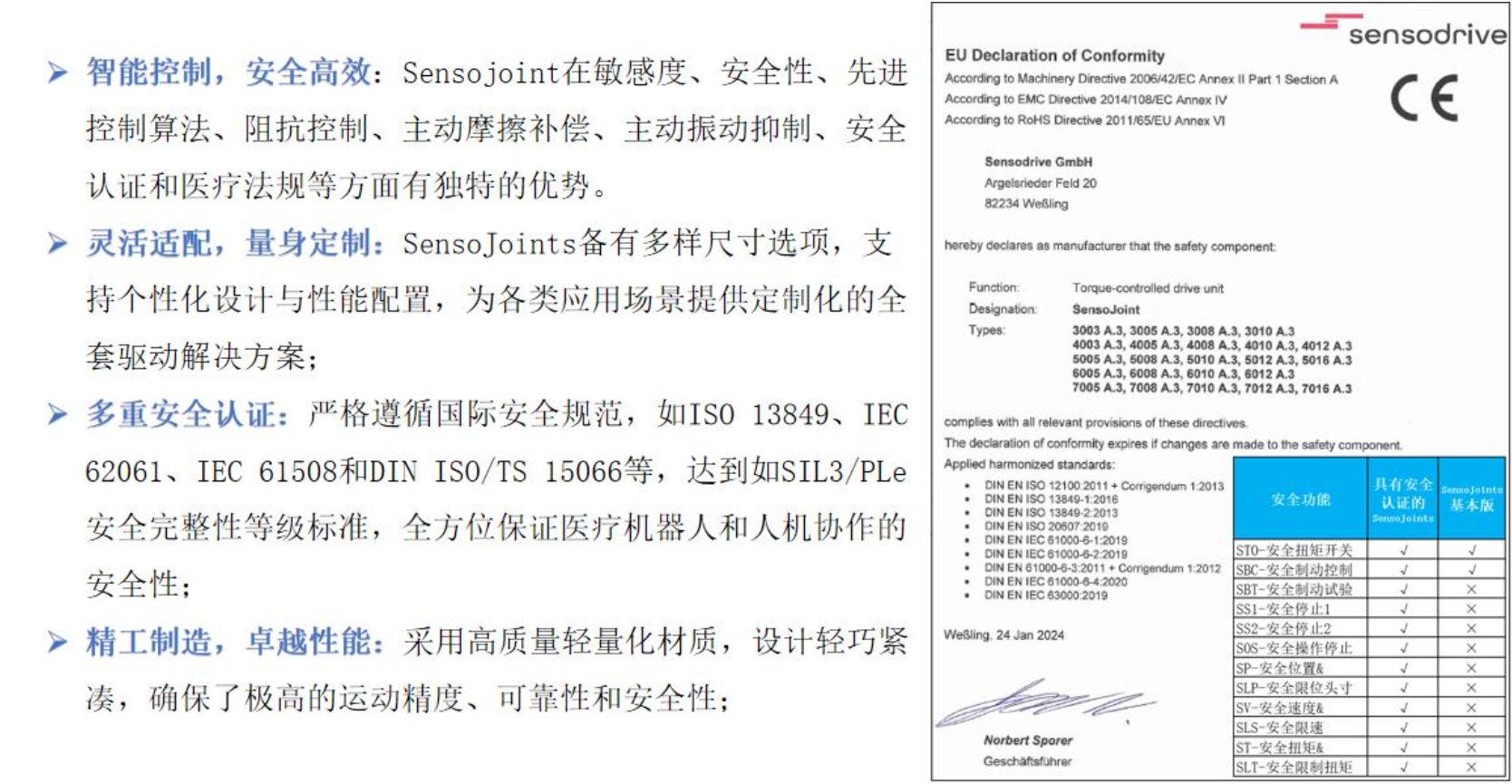
Sensodrive 作为项目合作伙伴,提供了 SensoJoints 机器人关节力控模组,这些模组的精确和灵敏操作对项目的成功起到了重要作用。由慕尼黑工业大学研发、SensoJoints 协助的深海垃圾收集设备,专为水下 100 米深处的垃圾收集设计。此项目推动了海洋清洁技术的发展,致力于解决海洋中大量垃圾沉积海底的问题。通过开发自主机器人系统,SeaClear2.0 项目提供了一种更安全、更经济的海底垃圾收集方案,以期改善海洋环境。
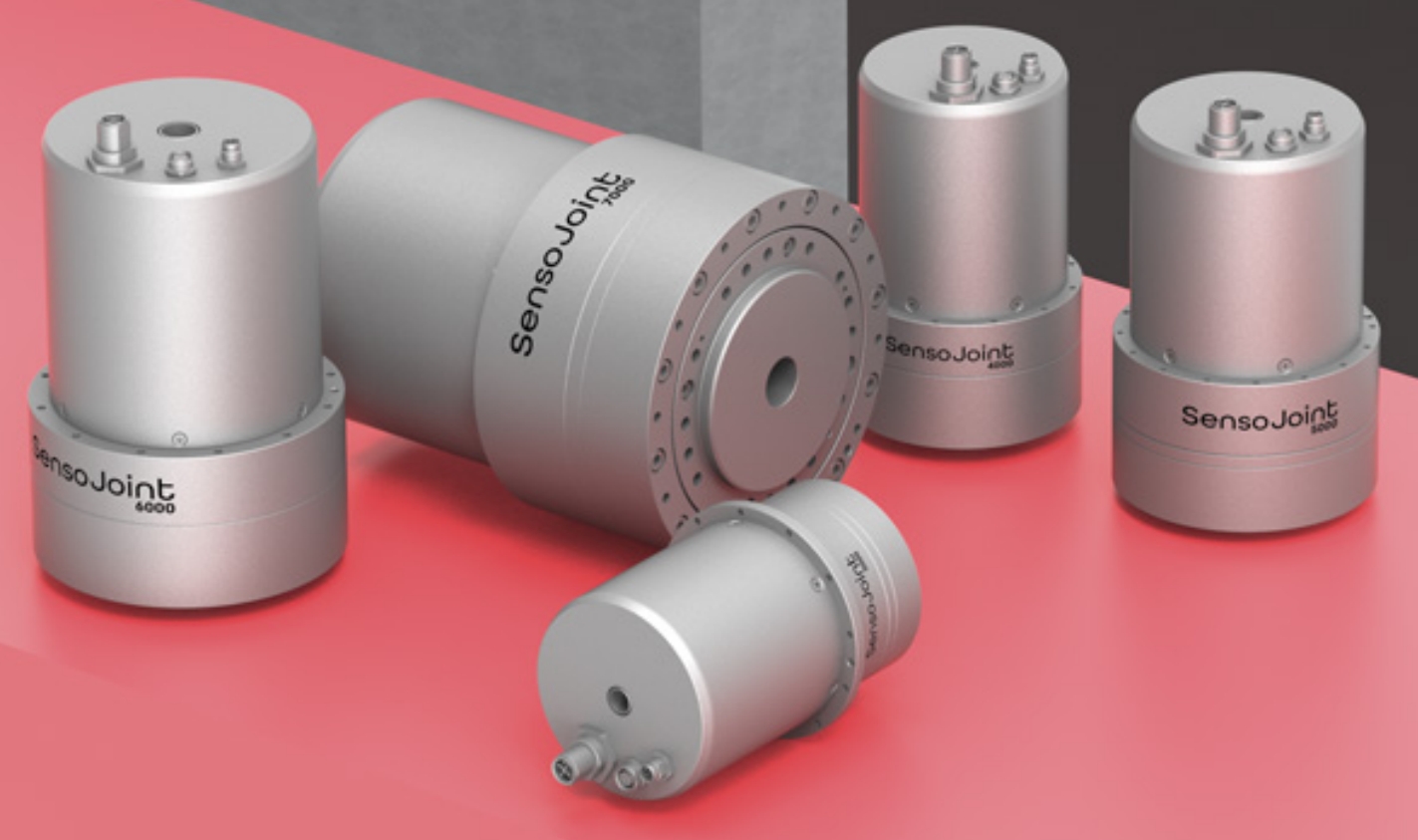
SensoJoints 机器人关节力控模组具备以下技术优势:

实时调整抓取力:其独特的扭矩控制算法可使机器人根据垃圾的形状和质地实时调整抓取力度,确保对不同物体的精准抓取。
强大的驱动能力:支持机械手高精度地抓取和运输重达 250 公斤的物体,适应海洋环境的需求。
高分辨率反馈:扭矩传感器提供高分辨率反馈,优化抓取策略,提高海洋垃圾收集的效率和成功率。
在SeaClear 2.0 项目中,SensoJoints的表现良好。Sensodrive 提供的机器人关节力控模组展示了其在海洋机器人领域的实用价值。这些便捷的驱动模块能够与各类机器人解决方案结合,为海洋清洁任务带来新的可能性。通过即装即用的驱动模块,SensoJoints 可以集成到各种机器人系统中,为海洋垃圾收集提供了高效、可靠的解决方案。