


DIGIT触觉传感器
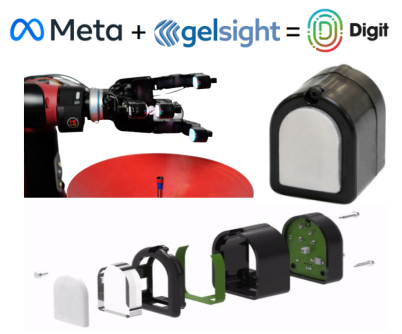
Meta和Gelsight合作商业化的Digit机器人视触觉传感器

欣佰特科技(北京)有限公司--DIGIT开源视触觉传感器市场合作伙伴
Tel:18001131966 Email:sales@cnbytec.com
作为 Meta AI 的合作伙伴,MIT 的衍生公司 GelSight 拥有独特的数字触觉传感技术和产品,现在将商业化制造 DIGIT视触觉传感器。

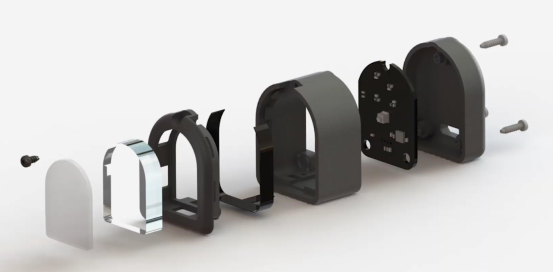
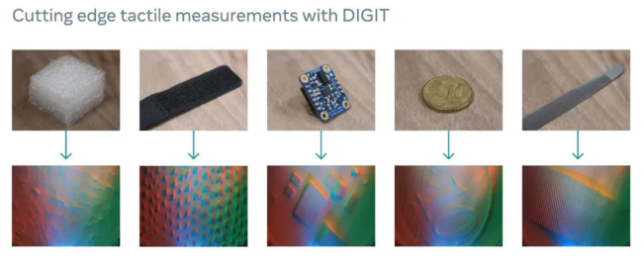
Digit采用RGB LED模组以及相机模块,由于手指在不同压力下会影响形变,而也会直接影响相机拍摄到颜色的变化,通过这个变化来判断触觉。
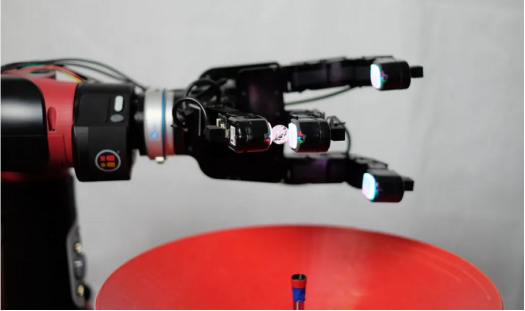
DIGIT设计与Allegrohand灵巧手兼容,也可通过转换法兰用于各种机器人夹爪末端如Robotiq,Onrobot等二指夹爪。
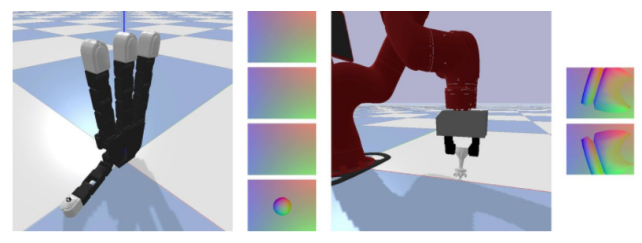

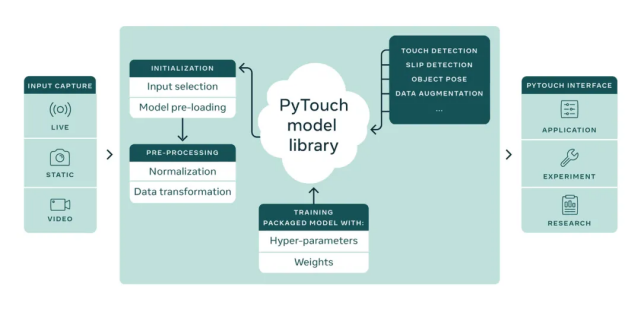
DIGIT高分辨率触觉传感器+ TACTO模拟器+PyTouch模型和功能库
参考TACTO模拟器 https://github.com/facebookresearch/tacto
模拟器1-rendering 4 DIGIT sensors on an Allegro Hand
模拟器2--rolling a marble with two DIGIT sensors
参考PyTouch https://github.com/facebookresearch/digit-interface